|
I am a final year PhD student in the Dyson Robotics Lab at Imperial College London, supervised by Prof. Andrew J. Davison. I work in 3D vision and am interested in creating low-dimensional abstractions of images for applications such as mapping, robotics, and augmented reality. Previously, I was a student researcher at Google Zurich and completed my Masters in Robotics at Carnegie Mellon University under the supervision of Prof. Michael Kaess. Email / Google Scholar / Twitter / Github |

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
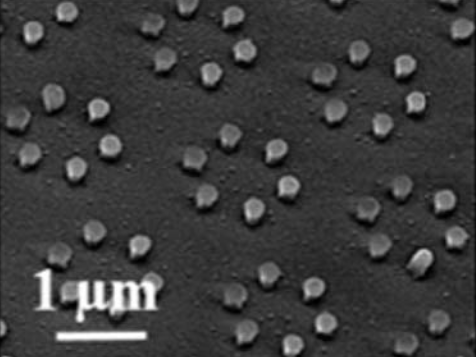
Alireza Bonakdar, Mohsen Rezaei, Robert L. Brown, Vala Fathipour, Eric Dexheimer, Sung Jun Jang, and Hooman Mohseni Optics Letters, 2015 Alireza Bonakdar, Mohsen Rezaei, Eric Dexheimer and Hooman Mohseni Nanotechnology, 2016 |
|
|